Grasp the Future: AI-powered ProRuka Advancing Prosthetic Hand Control with Sonomyography
Other Articles

A New Era of Precision and Affordability in Prosthetic Hand Design
Study conducted by Prof. Yong-ping ZHENG and his research team
and his research team
In the quest to enhance the quality of life for amputees, the development of advanced prosthetic hands has been a focal point of research. Despite the availability of powered multi-degree-of-freedom prosthetic hands, many amputees find existing options cumbersome, expensive, and lacking in functionality. Most patients refuse to use the bionic prosthetic hand because of the low level of comfort, lack of sensory feedback, and most importantly the low accuracy of the controlling system which causes the user to be unable to make precise hand gestures according to user’s intuitive movements to overcome daily challenges.
Prof. Yong-ping ZHENG, Henry G. Leong Professor and Chair Professor of the Department of Biomedical Engineering at The Hong Kong Polytechnic University, and his team identified the need for a low-cost multi-degree-of-freedom prosthetic hand and subsequently invented ProRuka, a novel prosthetic hand that integrates sonomyography (SMG) with artificial intelligence and wireless ultrasound imaging to offer a highly efficient human-machine interface (HMI) for controlling a prosthetic hand with six degrees of freedom (6-DOF) [1]. ProRuka represents a transformative step in prosthetic hand technology, offering amputees a functional, affordable, and user-friendly solution.
Sonomyography is a cutting-edge technique, pioneered at The Hong Kong Polytechnic University, which uses B-mode ultrasound imaging to monitor forearm muscle dynamic activities, providing a non-invasive method to collect and convert muscle activities into a signal for various HMI control purposes. Unlike conventional surface electromyography, which displays major disadvantages in detecting deep muscle activities and is easily affected by electrode movement and environmental noises, SMG provides a more reliable mean to capture both deep and superficial muscle activities, particularly the morphological changes linear to movements. ProRuka is a lightweight and cost-effective prosthetic hand that utilises wireless SMG for precise control, enabling amputees to perform a variety of hand movements necessary for daily activities (Figure 1).
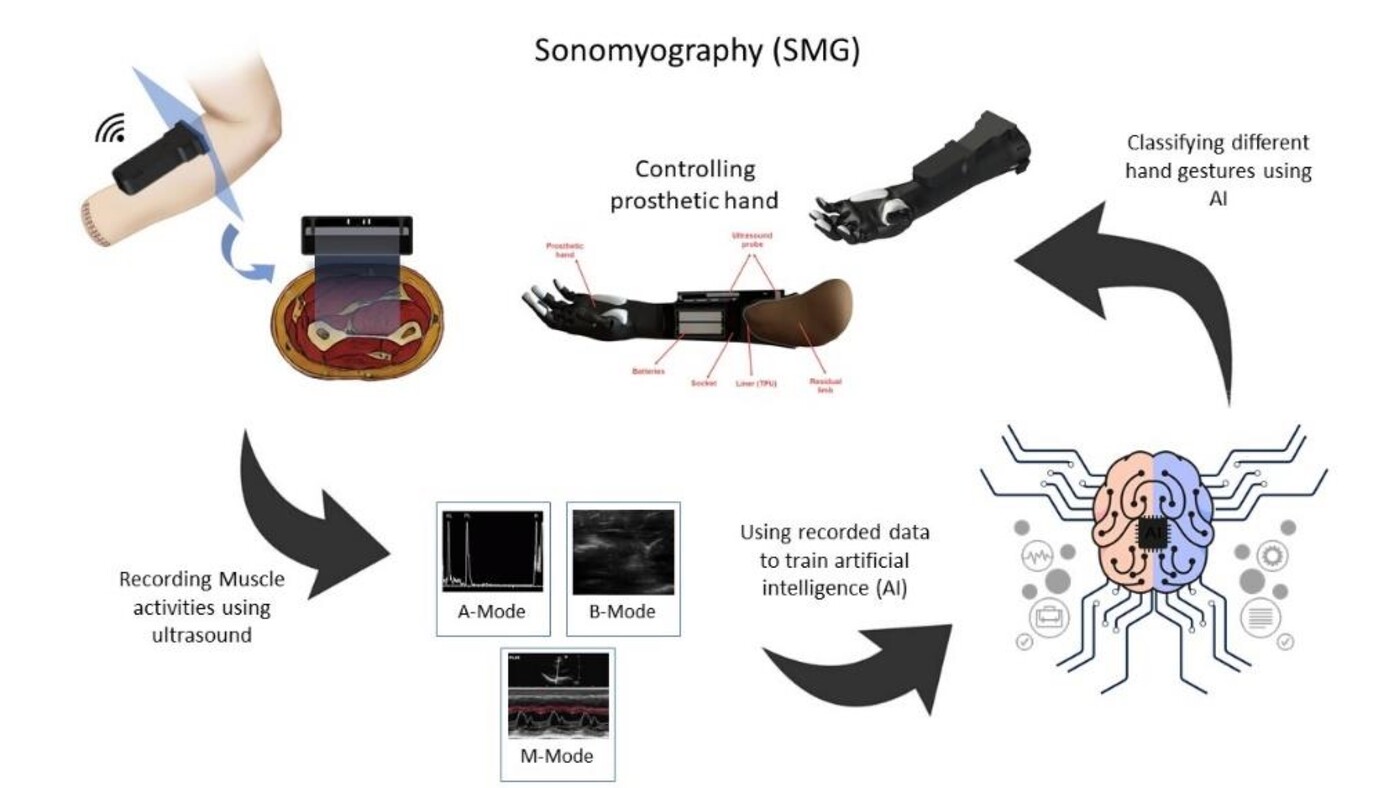
Figure 1. SMG and the method of controlling the prosthetic hand using an ultrasound probe
ProRuka's design prioritises anthropomorphism, functionality, and comfort, drawing inspiration from the structure of the human hand. The prosthetic hand is equipped with an artificial tendon mechanism for finger flexion and extension, mimicking natural hand movements. The team first prepared a 3D model of a normal human hand using a 3D scanner, then replaced the joints with mechanical ones to make the prosthesis functional. Finger tips and the palm were manufactured in silicone for better grip (Figure 2).
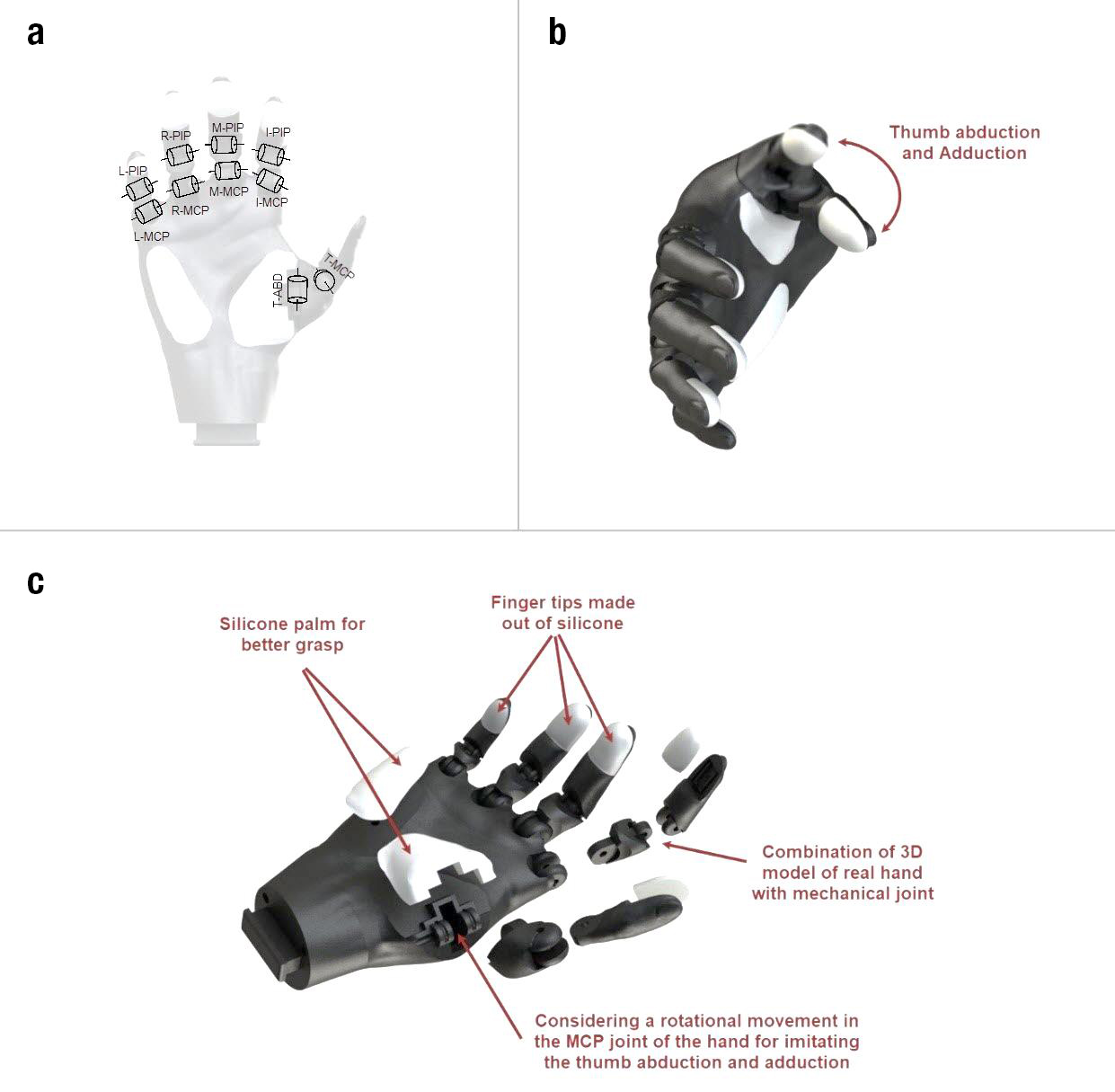
Figure 2. ProRuka Design
a) Front view of the prosthesis hand
b) Rotational joint in the CMC joint for mimicking thumb abduction and adduction
c) Components of the prosthetic hand
The ProRuka control system is powered by a combination of transfer learning models and classification machine learning algorithms, which use a pre-trained model to extract features from real-time ultrasound images inputs and classify the intended hand gestures (Figure 3). This approach allows for precise control of the prosthetic hand, offering a natural-like experience for users. The adoption of a sticky silicone pad replaces traditional ultrasound gel as coupling, preserving good image quality while reducing transducer relocation and prolonged moisture on skin, thereby improving the reliability of the SMG system.
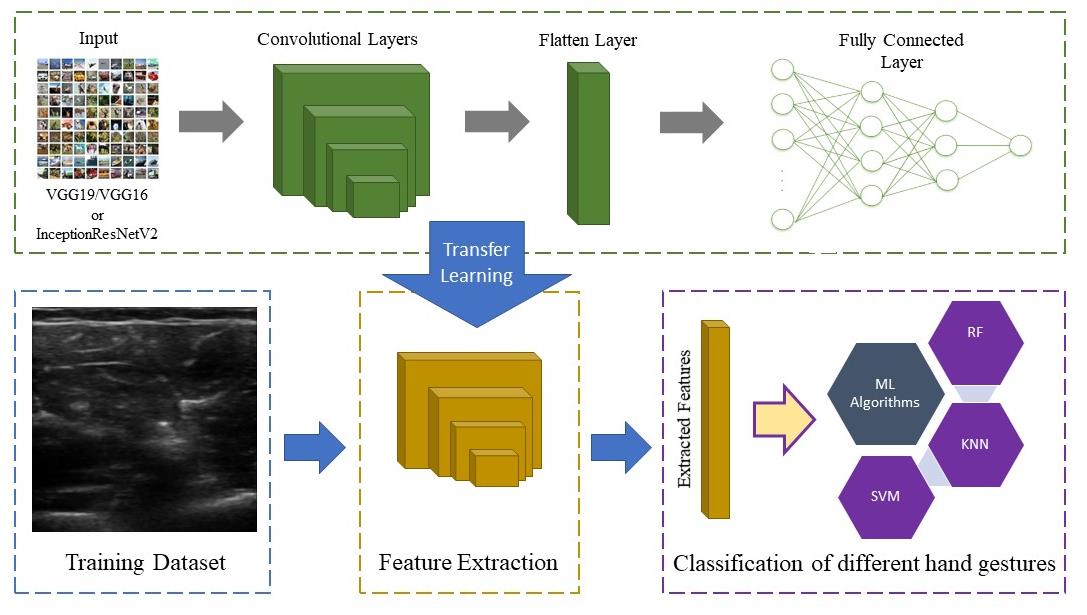
Figure 3. Hand gestures and movements classification process
A transfer learning model, VGG16, was used to extract features from the images, and further used for classification model training using the most effective machine learning algorithm identified from offline experimentation.
The development of ProRuka involved rigorous testing and evaluation of machine learning algorithms to classify hand gestures with high accuracy. In offline experiments with ten healthy participants, the system successfully classified nine different labelled hand gestures with a 100% success rate. Real-time tests with amputee subjects further demonstrated the prosthetic hand's ability to assist in performing essential hand functions. Two participants with trans-radial amputation were invited to do the ‘box and blocks test’, ‘targeted box and blocks test’ and ‘action research arm test’ (Figure 4). The results showed that users were able to make accurate hand movements and gestures like picking, grasping and gripping, confirming the potential of ProRuka as a practical solution for daily use.
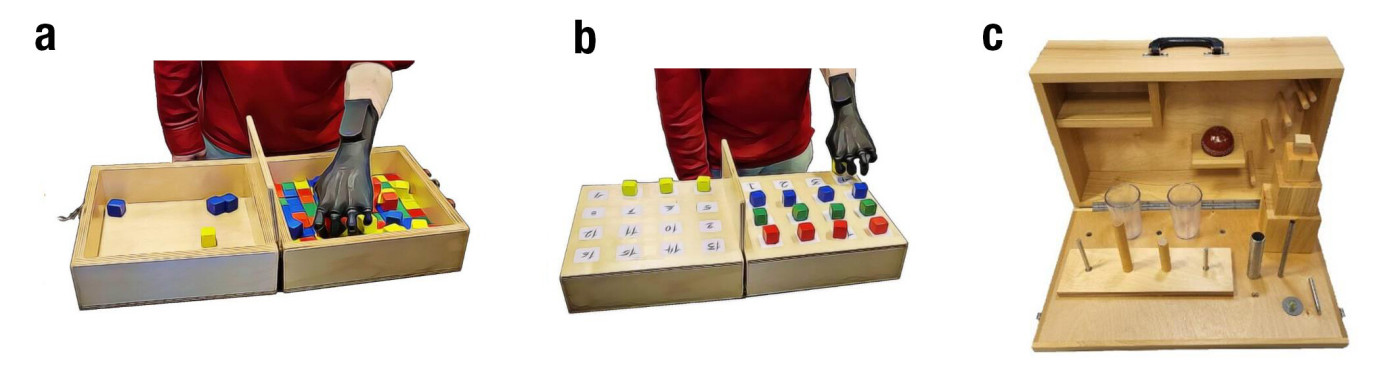
Figure 4. Real-time test with amputees
a) Box and blocks test: moving 150 blocks from one side to the other
b) Targeted box and blocks test (4*4): moving 16 blocks from one point to another target point precisely
c) Action research arm test: using the ARAT kit consisting of 19 different items to assess different grasping types
ProRuka's innovative design and control system mark a significant advancement in prosthetic technology. The prosthetic hand's ability to produce sufficient fingertip and palmar grasp forces ensures that users can manipulate objects effectively, while its lightweight construction enhances comfort and usability. The successful implementation of SMG as an HMI method opens new possibilities for non-invasive prosthetic control, paving the way for future developments in the field.
Despite promising results, ProRuka's current design has some limitations, such as the lack of sensory feedback and wrist rotation. Future research aims to address these challenges by incorporating additional degrees of freedom and exploring non-invasive methods for sensory feedback. Enhancements in AI algorithms will further refine the control system, enabling greater proportional and natural control over prosthetic hands.
This study was partially supported by funding from the Telefield Charitable Fund (Grant: ZH3V). ProRuka has been filed for US patent, US serial no. 18/305.415, title: PROSTHETIC HAND DEVICE USING A WEARABLE ULTRASOUND MODULE AS A HUMAN MACHINE INTERFACE, which covers the fundamental principles, controlling system and design of ProRuka. Prof. Zheng’s team in PolyU has also filed other patents related to SMG. The data source and materials are available at https://doi.org/10.48550/arXiv.2407.19859.
Prof. Zheng has been recognised by Stanford University as one of the top 2% most-cited scientists worldwide (career-long) in the field of artificial intelligence and image processing for four consecutive years, from 2021 to 2024, and one of the top 2% most-cited scientists worldwide (single-year) for five consecutive years, from 2020 to 2024. Prof. Zheng has been appointed as Henry G. Leong Professor in Biomedical Engineering since 2017, and he is currently the Director of Jockey Club Smart Ageing Hub, the Director of Research Institution of Smart Ageing and the Chair Professor of Biomedical Engineering of The Hong Kong Polytechnic University. In 2022, Prof. Zheng received the Bank of China (Hong Kong) Limited Science and Technology Innovation Prize for his exceptional accomplishments in the field of “Life and Health”.
| References |
|---|
[1] Nazari, V. & Zheng, Y. P. (2024), ProRuka: A highly efficient HMI algorithm for controlling a novel prosthetic hand with 6-DOF using sonomyography. arXiv: 2407.19859v1. https://doi.org/10.48550/arXiv.2407.19859
[2] Zheng, Y. P. et al., (2006), Sonomyography: Monitoring morphological changes of forearm muscles in actions with the feasibility for the control of powered prosthesis. Medical Engineering & Physics, 28(5), 405-415. https://doi.org/https://doi.org/10.1016/j.medengphy.2005.07.012
 | Prof. Yong-ping ZHENG Director, Research Institute for Smart Ageing Henry G. Leong Professor in Biomedical Engineering |


