




【Publication of SCI Journal Paper by AE Students with Their FYP】
Mr Max Jwo Lem Lee and Mr Shang Lee, a final-year undergraduate studying Aviation Engineering and recent graduate from the Aviation Engineering Program, respectively, have published their first academic paper in the Sensors peer reviewed journal under the supervision of Assistant Professor Li-Ta Hsu and MSc student Hoi-Fung Ng.
Titled “Skymask Matching Aided Positioning Using Sky-Pointing Fisheye Camera and 3D City Model in Urban Canyons”, the paper addresses the problem of GNSS positional inaccuracies in dense urban environments via the usage of a fisheye camera, neural network, and 3D model of the urban environment. After the user takes an image, the sky is identified using the neural network into a skyplot. This skyplot is then compared to skyplot’s generated using the 3D model, and weighted using multiple different methods to determine the improved bearing of the image and the most likely position.
The academic paper is linked below:
Lee MJL, Lee S, Ng HF, Hsu, L-T. (2020) Skymask Matching Aided Positioning Using Sky-Pointing Fisheye Camera and 3D City Models in Urban Canyons, Sensors, 20(17):4728. IF: 2.475 (157/601= 26.1% in Electrical and Electronic Engineering)
Sensors 2020, 20(17), 4728; https://doi.org/10.3390/s20174728
The Interdisciplinary Department of Aeronautical and Aviation Engineering would like to extend their congratulations to the authors of the paper.
The graphical abstract is given below.
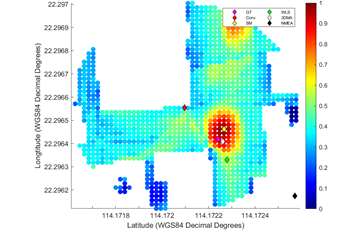


GNSS is a navigation tool that has deeply integrated itself into today’s society. Many activities from logistics to mapping utilise this form of navigation. However, GNSS has proven difficult to use in dense urban areas with many high-rises that can obscure or reflect signals, where positioning error may exceed 50 meters. Considering the proliferation of GNSS receivers integrated into smartphones and recent advances in the field of autonomous driving, accurate positioning is crucial to navigation of urban areas. A myriad of methods has been developed to dampen the severity of this issue, with one of the most notable being 3DMA post-processing techniques. However, these techniques tend to require large amount of computation resources to use. This paper introduces a machine learning intelligent classifier to distinguish between building and sky of a sky-pointing fisheye image, then compares and matches the building boundaries (skymask) with skymasks generated from a 3D model to determine the position of the receiver. In the offline process, skymasks are generated from the 3D model at each available position outside the buildings. After the user captures a fisheye image using a zenith-pointing fisheye camera. This image is segmented into 2 classes (building and sky) by the classifier, allowing comparison to the candidate skymasks surrounding the initial position estimated by the receiver. They are compared using four main scoring systems, by the differences of elevation, standard deviation of the elevation, peaks of the elevation, and heading. In the end, the image that has the highest score is selected as the improved position. Several designed experiments were tested in Hong Kong urban area to evaluate the performance of proposed Skymask Matching method with intelligent classifier. The method proves effective in dense urban environments, being capable of reducing positional uncertainty to a third of the initial position estimated by a smartphone. Venues for further improvement includes introducing more classes to the Classifier and expanding the camera movement to six degrees of freedom.

(Left) A positioning candidates heatmap in a densely urban environment, including the resultant positions of multiple processing techniques; (Right) A sky-pointing fisheye image and its candidate skymask counterpart; (Bottom) A graph displaying the building boundary similarity in azimuth and elevation degrees between the image converted skymask and its candidate skymask.
