Search and Rescue UAV System
Unmanned Aerial Vehicles (UAVs) are aircrafts that fly without a human pilot onboard. The development of UAVs is increasingly commonplace. Nowadays, they can provide various benefits and offer different kinds of function. Unfortunately, UAVs are not popularly used in Hong Kong but indeed they can assist humans in many operations.
The aim of this project is to design and fabricate an UAV which can execute a simulated search and rescue mission autonomously and we hope it can finally be used in real mission one day. UAVs can help to reduce the costs while increasing the amount of area searched, also improve in efficiency and safety of the mission. To accomplish this, the system is designed to incorporate light with long endurance and duration, equipped with telemetry, imaging, and global positioning system to aid humans in the target-searching mission. The ability to search from the air, our UAV utilizes the autopilot system for flight stability and autonomous flight.
A new generation of UAV “PolyU-Strike” was developed and successfully completed the Intelligence, Surveillance and Reconnaissance (ISR) mission in a wide coverage in 40 minutes and recognized all 6 targets by applying real-time imaging processing technics in 2016 Taiwan UAV competition. Champion is awarded in this event which has been vacant in the past two years. High resolution frames of targets with their GPS positions were reported. The total flight range was about 20 km and it costs 18 minutes. High resolution 2D&3D maps for the searching area based on flight data can be generated after the flight. Besides, an on-board system for acting as a signal relay to control and manage several UAVs in the same mission was demonstrated. Frequency hopping was applied to guarantee the communication security and two quadcopters were used to demonstrate the capability of the on-board system. The son quadcopter flied to somewhere far away and lost communication with the ground station due to the limit power of communication module, then it stopped its mission to wait for reconnection and further command. At the same time, the mother quadcopter flied to the son and tried to communicate with it through radio communication system. Once the communication was re-established, the son got the return command from the ground station and flied back to the home site safely. On the basis of its innovative idea and perfect fly test, our team won the champion in the Creativity Category also in the competition.
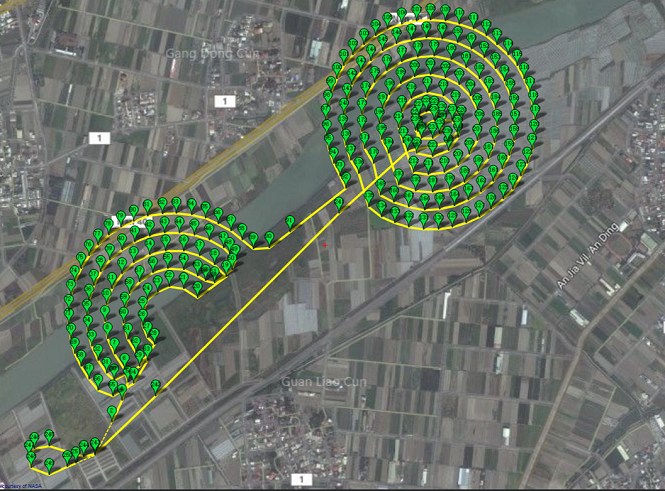
Flight Path
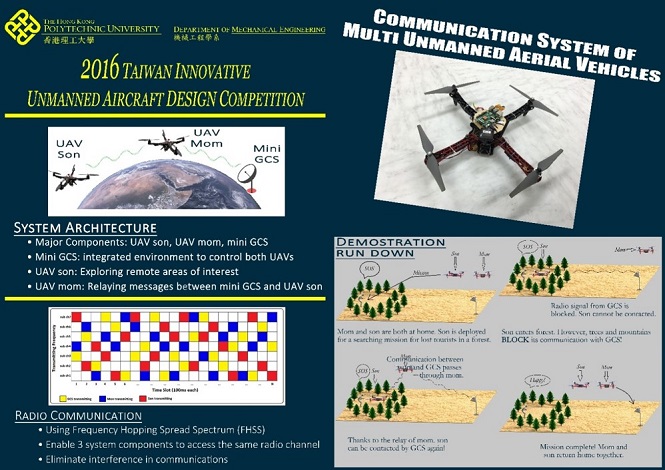
Remote Communication System
Award