Autonomous Landing system
In recent years, the development and application of unmanned aerial vehicles (UAVs) have been rapid. Nevertheless, the payload of a UAV is limited by the fixed capacity of the battery, and frequent landing operations are required for battery replacement or recharging. Hence, there is a significant need for a system for autonomous landing of UAVs on moving platforms, which would also further increase operation efficiency.
Autonomous Landing system
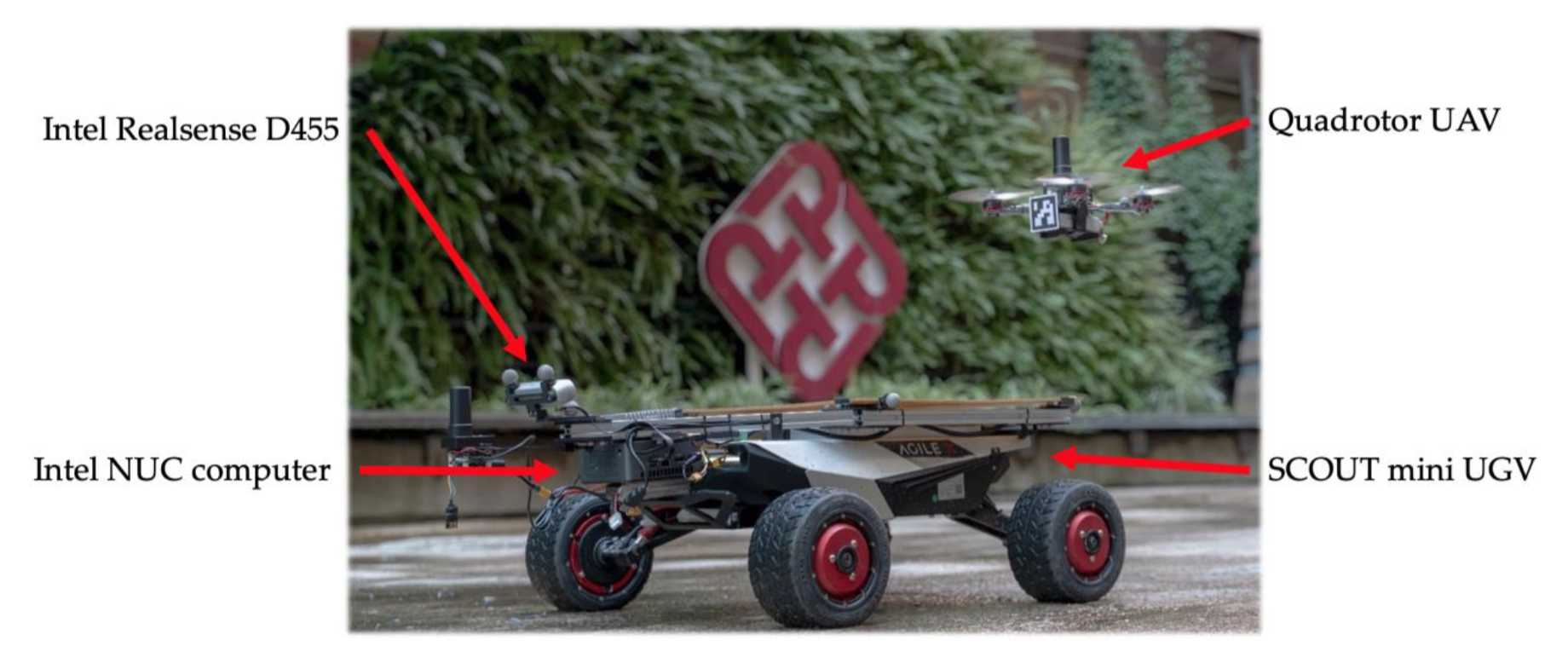
This work aimed to develop an autonomous system for unmanned aerial vehicles (UAVs) to land on moving platforms such as an automobile or a marine vessel, providing a promising solution for a long-endurance flight operation, a large mission coverage range, and a convenient recharging ground station. Unlike most state-of-the-art UAV landing frameworks that rely on UAV onboard computers and sensors, the proposed system fully depends on the computation unit situated on the ground vehicle/marine vessel to serve as a landing guidance system. Such a novel configuration can therefore lighten the burden of the UAV, and the computation power of the ground vehicle/marine vessel can be enhanced. In particular, we exploit a sensor fusion-based algorithm for the guidance system to perform UAV localization, whilst a control method based upon trajectory optimization is integrated. Indoor and outdoor experiments are conducted, and the results show that precise autonomous landing on a 43 cm × 43 cm platform can be performed.