

Research Area
Home
- Research Area
- 3D Mapping Aided GNSS Positioning
- Perceived Aided Sensors Integrated Navigation (PASIN) Scheme
- Realization of Low-Speed Autonomous Ground Vehicle
- GNSS Vector tracking in urban canyons
- Multi-sensors integrated navigation system for autonomous driving
- Collaborative Positioning for IoT in Smart Cities
- Positioning Integrity Monitoring for autonomous driving vehicle
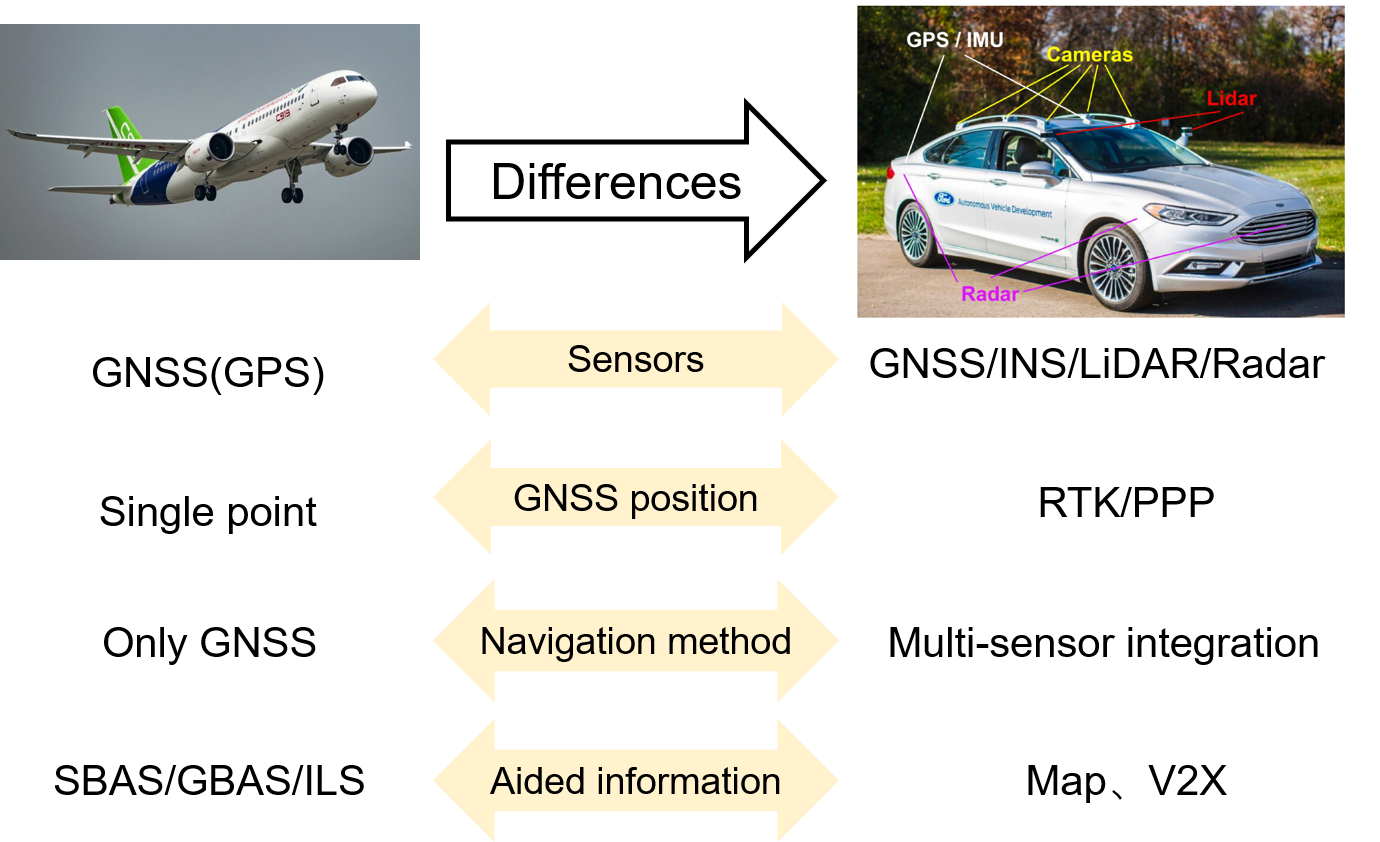
Positioning Integrity Monitoring for autonomous driving vehicle
The safety of autonomous driving is in prime importance. We aim to compare and combine the safety concepts in both automobile and civil aviation to develop a new integrity monitoring algorithm for the integrated navigation system.
Researcher :
Dr Qian MENG (Postdoctoral Researcher)
Related Publication:
A GPS SPOOFING GENERATOR USING AN OPEN SOURCED VECTOR TRACKING-BASED RECEIVER
Qian Meng, Li-Ta Hsu, Bing Xu Xiapu Luo, Ahmed El-Mowafy
Sensors, 19 (18):3993.
BACK TO TOP