

Research Area
Home
- Research Area
- 3D Mapping Aided GNSS Positioning
- Perceived Aided Sensors Integrated Navigation (PASIN) Scheme
- Realization of Low-Speed Autonomous Ground Vehicle
- GNSS Vector tracking in urban canyons
- Multi-sensors integrated navigation system for autonomous driving
- Collaborative Positioning for IoT in Smart Cities
- Positioning Integrity Monitoring for autonomous driving vehicle
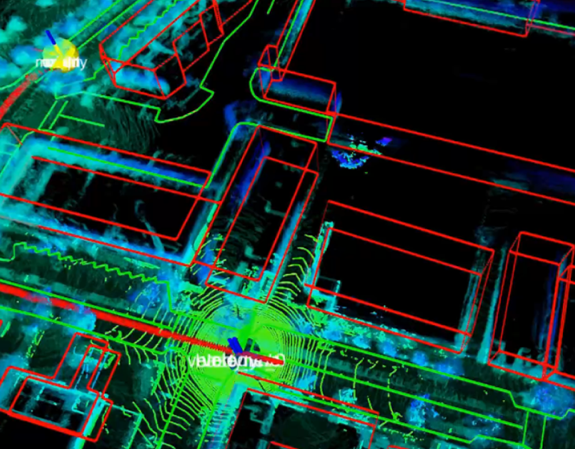
Multi-sensors integrated navigation system for autonomous driving
Autonomous driving is available in relatively-simple environments such as highway and suburban areas. We aim to develop a GNSS-RTK/LiDAR/INS integrated navigation system for highly urbanized cities such as Hong Kong and Tokyo.
Researcher : Dr Weisong WEN(Research Assistant Professor);
Dr Guohao Zhang (Research Assistant Professor)
Related Publication:
TIGHTLY COUPLED GNSS/INS INTEGRATION VIA FACTOR GRAPH AND AIDED BY FISH-EYE CAMERA
Weisong Wen, Xiwei Bai, Yin-Chiu Kan, Li-Ta Hsu
IEEE Transactions on Vehicular Technology, (online published)
OBJECT DETECTION AIDED GNSS AND ITS INTEGRATION WITH LIDAR IN HIGHLY URBANIZED AREAS
Weisong Wen, Guohao Zhang, Li-Ta Hsu
IEEE Intelligent Transportation Systems Magazine, (Accepted)
INTELLIGENT GNSS/INS INTEGRATED NAVIGATION SYSTEM FOR A COMMERCIAL UAV FLIGHT CONTROL SYSTEM
Guohao Zhang, Li-Ta Hsu
Aerospace Science and Technology, 80:368-380.
BACK TO TOP