
- Open Resources
- UrbanNav
UrbanNAV
An Open-Sourcing Localization Dataset Collected in Asian Urban Canyons, including Tokyo and Hong Kong
Under development and approval by IAG (International Association of Geodesy) and ION (Institute of Navigation).
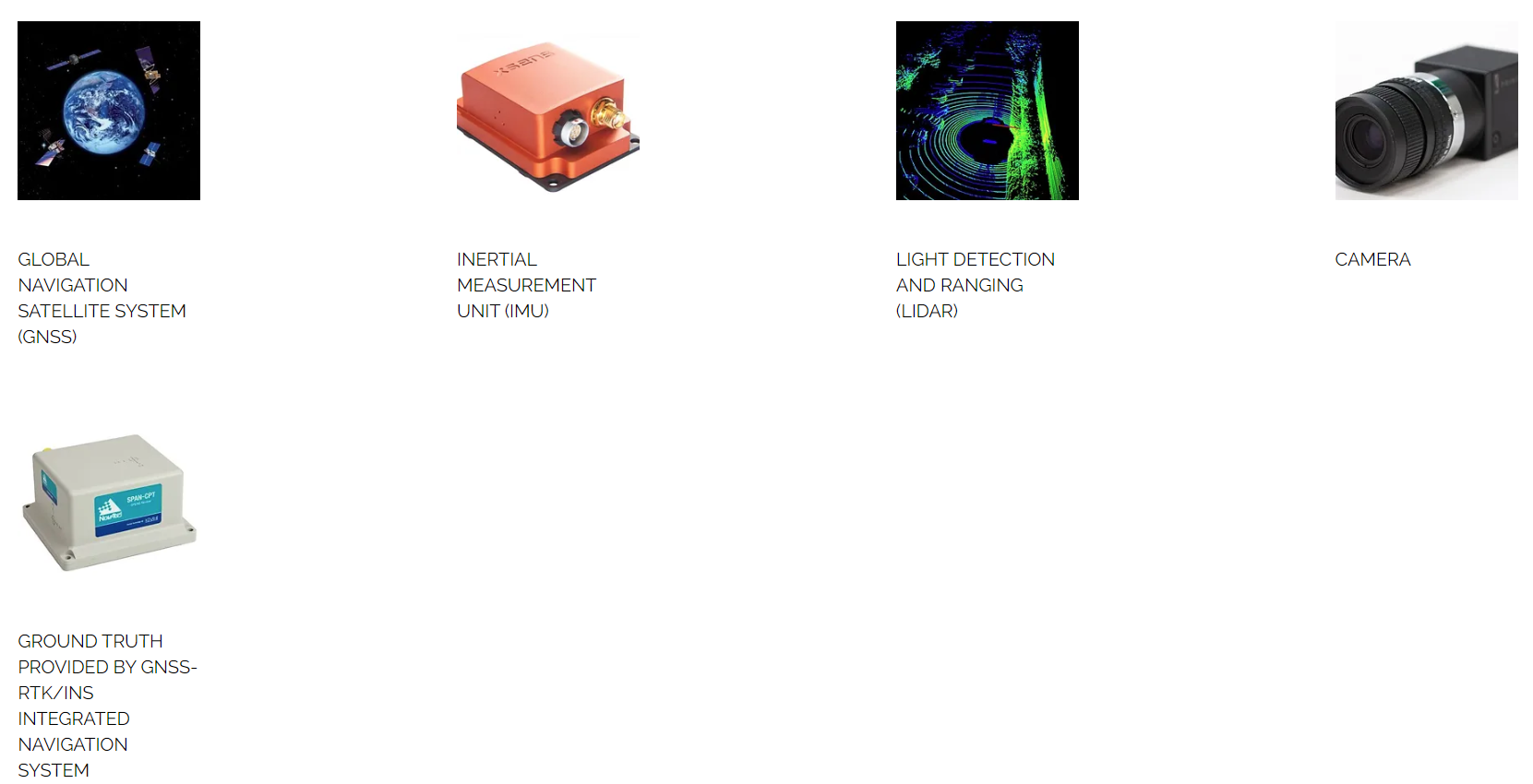
Positioning and localization in deep urban canyons using low-cost sensors is still a challenging problem. The accuracy of GNSS can be severely challenged in urban canyons due to the high-rising buildings, leading to numerous Non-line-of-sight (NLOS) receptions and multipath effects. Moreover, the excessive dynamic objects can also distort the performance of LiDAR, and camera. The UrbanNav dataset wishes to provide a challenging data source to the community to further accelerate the study of accurate and robust positioning in challenging urban canyons. The dataset includes sensor measurements from GNSS receiver, LiDAR, camera and IMU, together with accurate ground truth from SPAN-CPT system. Different from the existing dataset, such as Waymo, KITTI, UrbanNav provide raw GNSS RINEX data. In this case, users can improve the performance of GNSS positioning via raw data. In short, the UrbanNav dataset pose a special focus on improving GNSS positioning in urban canyons, but also provide sensor measurements from LiDAR, camera and IMU. You can download the data from
https://github.com/IPNL-POLYU/UrbanNavDataset . If you got any problems when using the dataset and cannot find a satisfactory solution in the issue list, please open a new issue on Github and we will reply ASAP.
Key words: Positioning, Localization, GNSS Positioning, Urban Canyons, GNSS Raw Data,Dynamic
Related Papers:
Key words: Positioning, Localization, GNSS Positioning, Urban Canyons, GNSS Raw Data,Dynamic
Related Papers:
Sensor include:
BACK TO TOP