Bio-inspired Multi-tail Omni-directional Underwater Robot - Biomoubot
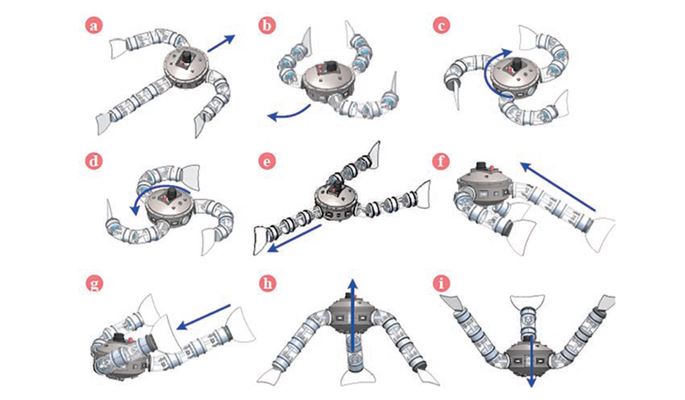
With a bio-inspired approach, this new-generation underwater robot is innovatively designed by mimicking tadpoles, snakes and octopus with a round head and three or more snake-like tails. The robot can thus mimic different aquatic animal motions like a tadpole, octopus or frog and achieve high omni-directional motion capability in underwater environments. As such, it can be applied in many different underwater missions, such as underwater infrastructure inspection, aquatic animal tracking, coral reef studies and water quality monitoring.